Loading...
Searching...
No Matches
自動制御 More...
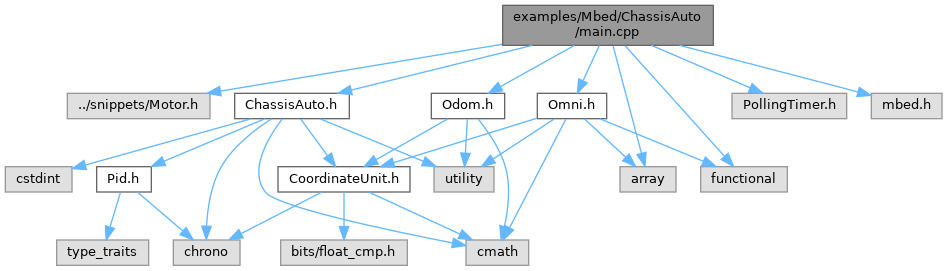
#include <../snippets/Motor.h>#include <ChassisAuto.h>#include <Odom.h>#include <Omni.h>#include <PollingTimer.h>#include <mbed.h>#include <array>#include <functional>
Include dependency graph for main.cpp:
Go to the source code of this file.
Functions | |
| bool | check_reached (const Coordinate &dst, const Coordinate &pos) |
| hoge | |
| int | main () |
Variables | |
| Timer | timer |
| Odom< 3 > | odom {} |
| Motor | motors [3] = {{D10, D11}, {D12, D13}, {D12, D13}} |
| ChassisAuto< Omni< 3 > > | chassis |
Detailed Description
自動制御
Definition in file main.cpp.
Function Documentation
◆ check_reached()
| bool check_reached | ( | const Coordinate & | dst, |
| const Coordinate & | pos | ||
| ) |
◆ main()
Variable Documentation
◆ chassis
| ChassisAuto<Omni<3> > chassis |