Loading...
Searching...
No Matches
ChassisPid.h File Reference
足回りの速度のPID制御を行うChassisPidを提供する。 More...
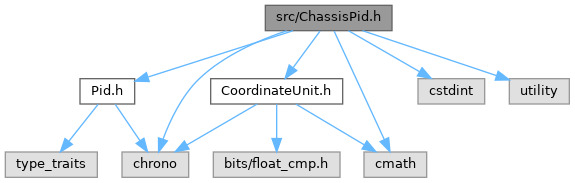
#include <CoordinateUnit.h>#include <Pid.h>#include <chrono>#include <cmath>#include <cstdint>#include <utility>
Include dependency graph for ChassisPid.h:
Go to the source code of this file.
Data Structures | |
| struct | rct::ChassisPid< T > |
| 足回りの速度のPID制御を行う。 More... | |
Namespaces | |
| namespace | rct |
| robot control library | |
Detailed Description
足回りの速度のPID制御を行うChassisPidを提供する。
- Copyright
- Copyright (c) 2022-2023 Yoshikawa Teru
- License
- This project is released under the MIT License, see LICENSE.
Definition in file ChassisPid.h.