Loading...
Searching...
No Matches
4輪独立ステアリングの制御例 More...
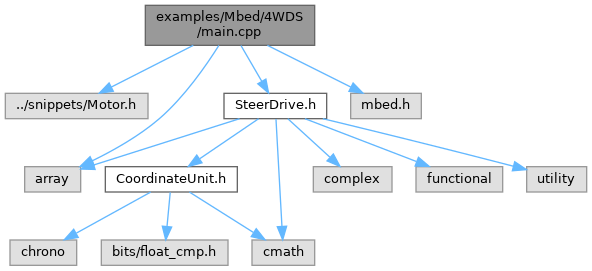
Include dependency graph for main.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
| [construct] | |
Variables | |
| Motor | motors [4] = {{D8, D9}, {D10, D11}, {D12, D13}, {D14, D15}} |
| PwmOut | servo [4] = {D4, D5, D6, D7} |
| SteerDrive< 4 > | steer |
| [construct] | |
Detailed Description
4輪独立ステアリングの制御例
Definition in file main.cpp.